北京工业大学 | 汽车辅助驾驶安全防撞预警系统
本项目依托于211高校计算智能与智能系统北京市重点实验室,研发团队包含工作人员(5名博士、4名硕士)以及6名研究生组成组成。本项目从2008年开始,经过多年研究,具有充足的技术积累。成果属于先进辅助驾驶(ADAS)技术的一部分,是应用的热点之一。目前市场上采用雷达较多,但成本高,基于图像的系统较少。本成果利用安装在汽车上的单目镜头采集视频图像,利用计算机视觉等技术,开发了汽车安全防撞预警系统,能自动实现车辆检测、跟踪与测距,给驾驶员提供安全防撞预警信息。本技术已经完成前方车辆安全防撞预警算法、车道线检测算法、车辆左右盲区安全防撞预警算法以及软件的开发,用采集的实际现场场景测试,效果良好。其核心技术均处于国内先进水平,拥有自主知识产权。
样机(样品)
成果简介
本成果属于先进辅助驾驶(ADAS)技术的一部分,目前是应用的热点之一。目前市场上采用雷达较多,但成本高,基于图像的系统较少。
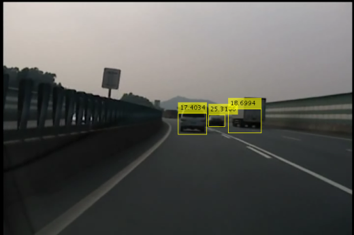
利用安装在汽车上的单目镜头采集视频图像,利用计算机视觉等技术,开发了汽车安全防撞预警系统,能自动实现车辆检测、跟踪与测距,给驾驶员提供安全防撞预警信息。
该系统由摄像头、车辆图像处理算法和软件、硬件处理模块等部分组成,安装在汽车上。
本系统可以实现对白天和夜间的前方车辆进行检测、跟踪与测距,也能增加对行车过程中车道线偏离进行检测的模块,可以用于车辆防撞预警。
车辆检测具有较高的准确率和实时性,与采用雷达相比,实现成本低。
可以开发独立的车辆防撞预警系统,也可以在目前行车记录仪基础上增加车辆防撞预警功能模块。
潜在应用场景
1. 无人驾驶、辅助驾驶、新一代行车记录仪系统;
2. 机器人防撞障碍物探测感知、自主导航系统;
3. 智能交通监控系统(交通拥堵预警、事故跟踪等);
4. 多媒体录播跟踪系统;
......
技术优势
1. 单目镜头采集视频图像,成本低,可将防撞预警系统成本从万元级降至千元级;
2. 能处理白天和黑夜多场景的车辆检测、跟踪与测距;
3.算法运算速度快、精度好、实时性高,系统准确率综合达到94.1%,平均耗时仅28ms;
4.使用的标定方法简单快速,适用于实际环境操作,技术在无人驾驶、辅助驾驶、新一代行车记录仪等领域可进行市场化应用。
专利号
软件著作权:2011SR087341,2015SR169389,2015SR021624,2016SR045698,2016SR045777,2018SR296952。
1.1 前方车辆安全防撞预警技术
采用多特征融合的单目视觉车辆检测与跟踪新方法,具体内容如下:
1. 图像预处理与增强
根据前车出现区域及正常行驶场景构图等先验知识,选定原始图像纵向1/2以下为感兴趣区域(Region of Interest, ROI)区域,可排除高空及复杂背景对后续算法影响,减轻计算负担。
2. 特征提取及初步筛选
对分割后的阴影区域进行二值图像连通分量特征提取,所选用的特征属性包括:联通分量区域像素总数、区域外接矩形、区域重心坐标、区域长轴长度、短轴长度、长轴短轴比率、方位角信息、紧致度信息。
3. 基于神经网络车辆检测算法
传统反向传播神经网络学习算法是梯度下降法,利用误差的一阶微分信息,在训练过程中存在一些缺陷和不足;Levenberg-Marquardt神经网络学习算法利用二阶微分信息进行网络权值更新,收敛速度快,实用性好,广泛应用于最优化算法,分类和识别神经网络的训练。
我们提出的车辆检测算法在训练数据中准确率综合达到94.1%。使用此算法能够保证在中近距离内实时,准确,低误报的检测车辆,对可能存在的碰撞隐患输出告警信号。
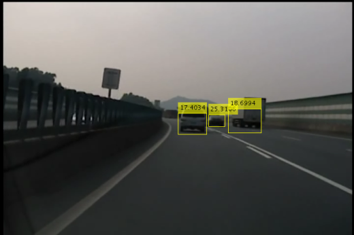
4.基于加权颜色直方图的Meanshift车辆跟踪算法
基于Meanshift的多目标跟踪算法依靠特征空间中的样本点进行分析,不需先验知识,收敛速度快,在图像平滑,图像滤波,图像分割以及目标跟踪等许多计算机视觉研究领域得到广泛的关注和应用。
采用经典检测-跟踪-检测框架进行视频流图像的连续处理,通过运行硬件平台下算法时间效率及检测算法,跟踪算法稳定性设定合理跟踪帧长阈值,可成功处理车辆驶离前方预警区域及由于超车新加入预警区域情况下算对目标增减的情况。当车辆检测算法成功检测前方车辆后,计算并描述跟踪目标模板并进入后续跟踪算法,跟踪算法同时跟踪前方多目标,循环往复直至处理完毕,处理流程如图1所示,使用MeanShift跟踪算法跟踪前方检测出的多目标车辆效果如图:
1.2盲区车辆安全防撞预警算法
1.盲区车辆检测算法
我们提出一种并行AdaBoost(Concurrent AdaBoost,CAdaBoost)算法并将其应用到单目盲区车辆检测中。与传统AdaBoost相比,CAdaBoost在训练弱分类器时通过并行的方式选择弱分类器,并在原有弱分类器系数的基础上引入加权参数,能够更准确地描述被选择的弱分类器在最终强分类中的作用。首先,确定ROI区域,即在的范围进行车轮检测,的范围进行车头检测;其次,对ROI区域内的车头和车轮分别提取Haar-like特征;最后利用CAdBoost算法对盲区车辆进行检测。通过与经典的分类方法及多种AdaBoost分类器进行了
对比,结果表明ICAdaBoost取得更高的检测率和更低的误检率,并获得更短的训练时间,证明了该方法的有效性。具体步骤如下:
(1)提取Haar-Like特征
(2)基于改进AdaBoost算法的盲区车辆检测
(3)盲区车辆检测结果后处理融合
我们提出的基于ICAdaBoost盲区车辆检测算法不仅获得了97.93%最高检测正确率,而且在单帧的盲区车辆检测中时间最短,能够很好的满足实时性的需求。

2.盲区跟踪算法
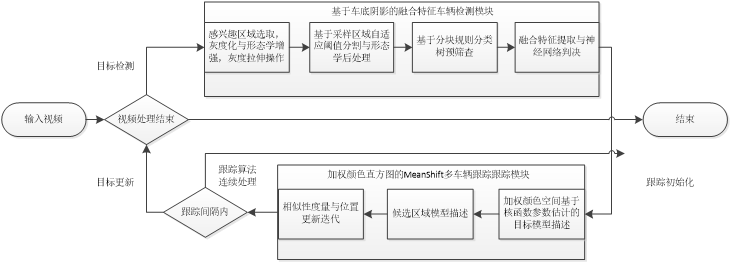
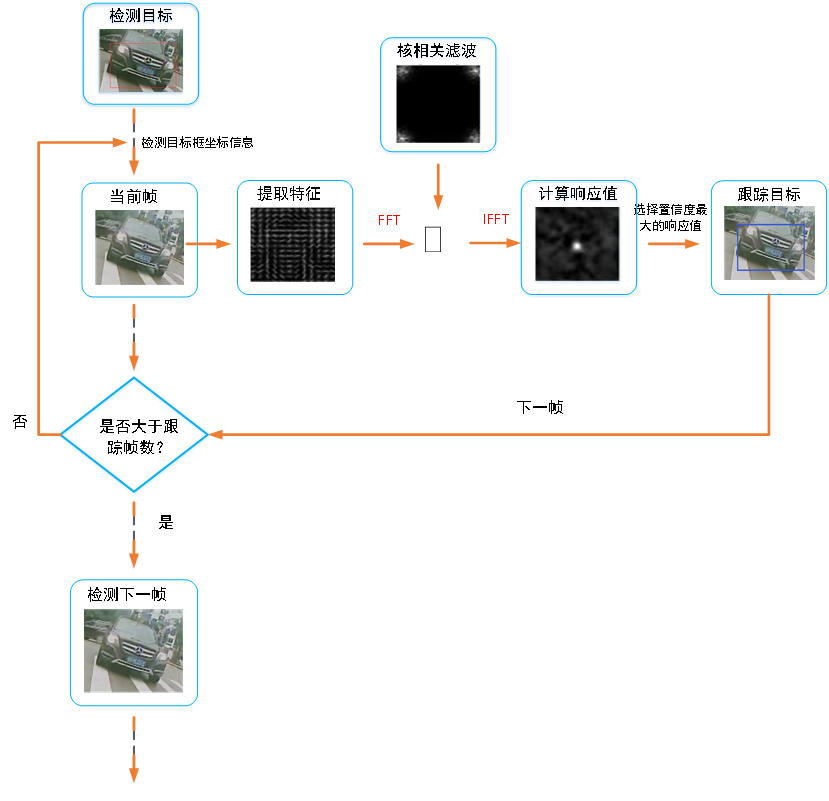
采用KCF跟踪算法,主要解决寻找在空间域上岭回归问题的最优滤波器的问题,通过学习核化的正则化最小二乘线性分类器对目标进行。KCF跟踪算法的核心思想是:通过引入密集采样的概念,利用循环移位得到循环矩阵;然后运用高斯核函数计算分类器与新一帧图像候选区域的相关系数,最大相关系数的点即更新的目标位置。根据循环卷积定理,所有与循环矩阵的点积运算都可以转化为与该矩阵第一行向量的卷积运算,计算速度得到很大提升。
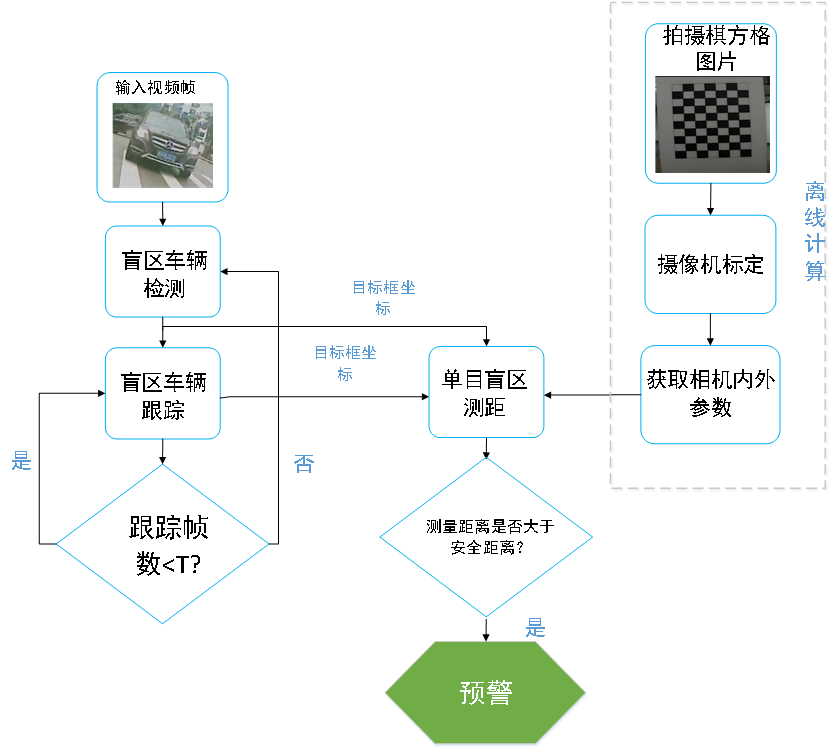
3.盲区车辆测距算法
采用基于小孔成像测距模型的单目盲区车辆测距方法,测出距离之后与预警安全距离进行比较,如果小于阈值则进行预警提醒,进而辅助驾驶员安全行驶。预警流程如图:
其它方面
还开发了与车载先进辅助驾驶相关的如下技术:
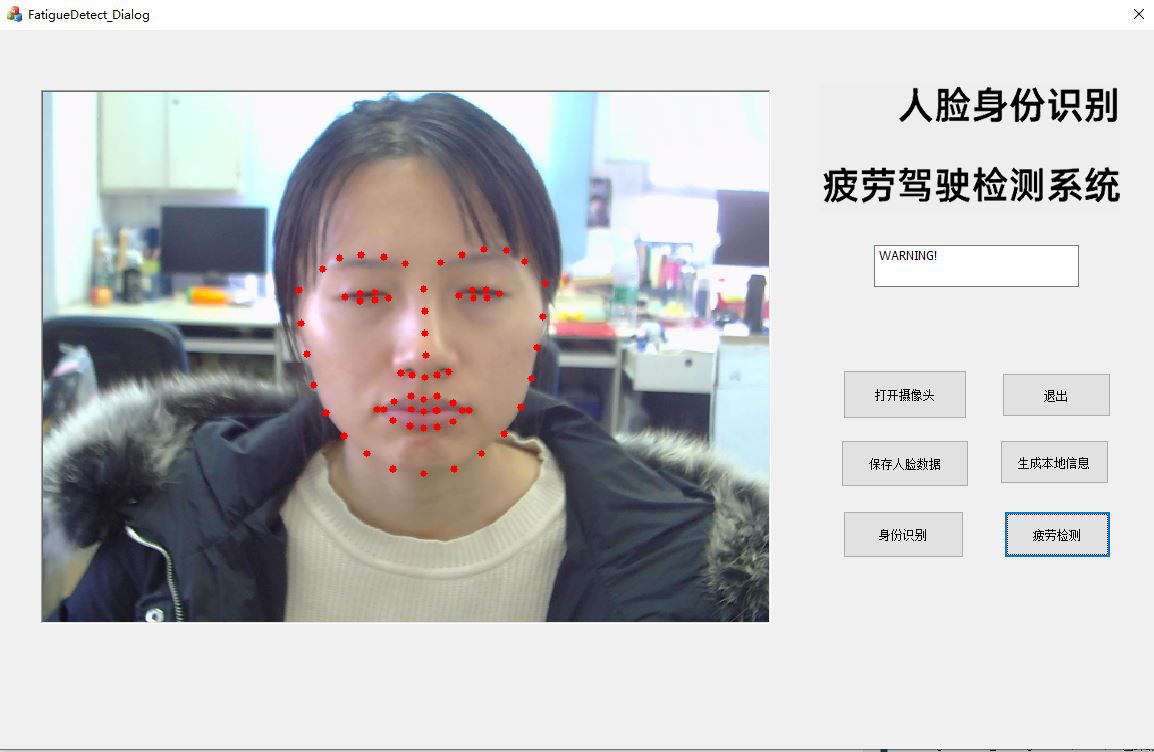
司机的疲劳驾驶检测与人脸识别:
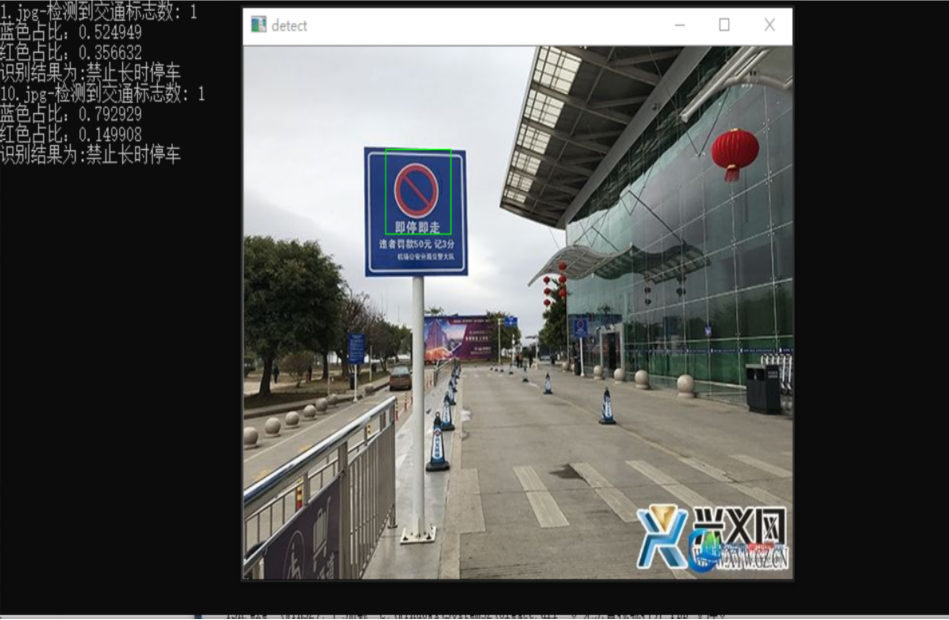
交通标志识别技术

打开微信
“扫一扫”
发需求 | 企业创新管家

接需求 | 专家小助手
